Теория систем автоматического управленияПримеры непрерывных автоматических систем
Одна из первых в истории техники автоматических систем была изобретена И. И. Ползуновым в 1765 г. Это был автоматический регулятор уровня воды в котле его паровой машины (рис. 1.11). Измерительное устройство (поплавок), измеряющее управляемую величину (высоту уровня воды в котле), непосредственно перемещает управляющий орган (клапан питания котла водой). Котел является управляемым объектом.
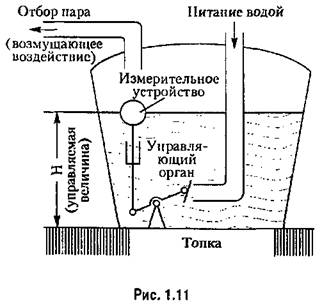
Изменение величины отбора пара из котла в паровую машину является основным возмущающим воздействием на объект. Если отбор пара увеличится, испарение воды ускорится, уровень воды Н начнет уменьшаться. Тогда поплавок, опускаясь, будет шире открывать клапан, усилится приток питающей воды, и уровень ее будет автоматически восстанавливаться. Кроме изменения отбора пара, возмущающее воздействие па объект будет проявляться также и в изменении условий теплового режима работы котла (интенсивность топки, температура питающей воды и окружающего пространства). Регулятор во всех случаях будет действовать так, чтобы ликвидировать нежелательное отклонение уровня воды, по каким бы- причинам оно пи возникало.
Следующим в истории техники автоматическим регулятором, получившим широкое распространение, был центробежный регулятор скорости вращения вала паровой машины, изобретенный Уаттом в 1784 г. (рис. 1.12). Этот регулятор имеет другую конструкцию и другую природу управляемой величины (угловая скорость со), но совершенно тот же общий принцип действия.
Измерительное устройство (центробежный механизм) реагирует на
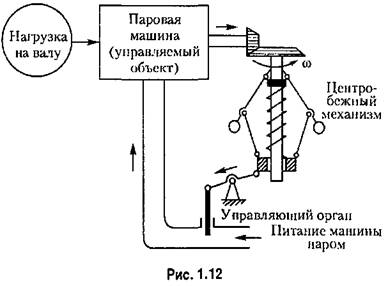
изменение управляемой величины со. Так. если угловая скорость вала со увеличивается, шары центробежного механизма расходятся, муфта поднимается и перемещает непосредственно управляющий орган (например, заслонку в трубе питания машины паром). Это изменяет приток энергии в машину, чем автоматически уничтожается нежелательное отклонение угловой скорости со.
Основным возмущающим воздействием на объект здесь является изменение нагрузки на
валу паровой машины. Кроме этого, может иметь место и другое возмущающее воздействие в виде нарушения нормальных параметров пара в трубе питания машины. Регулятор гасит влияние любого воздействия (в определенных пределах), стремясь все время ликвидировать отклонение, по какой бы причине оно ни возникало.
Для иллюстрации общности принципов построения систем автоматического управления относящихся к самым разнообразным техническим объектам, приведем еще несколько конкретных примеров.
На рис. 1.13 изображена схема автоматической стабилизации температуры воды или масла в тепловом двигателе. Нагретая вола из двигателя (управляемый объект) поступает в термостат (измерительное устройство). Если температура воды повышается, то под действием увеличения давления паров специальной легко испаряющейся жидкости, находящейся в сильфоне термостата, прикрывается клапан прямого возврата воды в двигатель. Вследствие этого большее количество воды пойдет в обход — через радиатор, где она охлаждается. Таким образом, автоматически
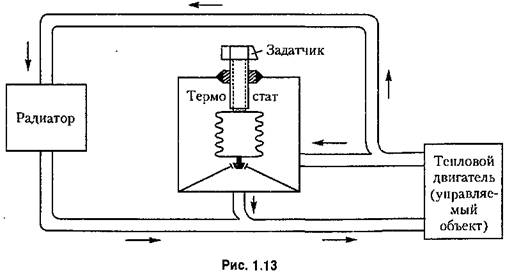
поддерживается постоянная температура воды в системе охлаждения теплового двигателя (в частности, автомобильного).
 представляет собой возмущающее воздействие. представляет собой возмущающее воздействие.
Примерами связанных систем являются системы стабилизации напряжения и частоты переменного тока, стабилизации скорости и температуры в реактивных двигателях, стабилизации различных величин в энергетической системе, состоящей из нескольких параллельно работающих объектов. Связанная система управления получается и при рассмотрении работы всего автопилота на самолете в целом.
Пример электромеханической следящей системы показан на рис. 1.15. Принцип ее действия следующий.
 поступает на обмотку управления двигателя Дв, который начинает вращаться, поворачивая через редуктор Р исполнительную ось в сторону уменьшения ошибки. поступает на обмотку управления двигателя Дв, который начинает вращаться, поворачивая через редуктор Р исполнительную ось в сторону уменьшения ошибки.
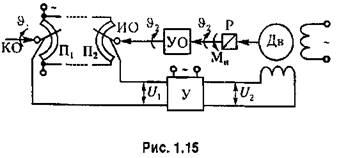
Подобная следящая система позволяет при незначительной мощности, требуемой для вращения командной оси, управлять мощными или тяжелыми объектами (орудийными башнями, антеннами радиолокаторов и т. п.). Кроме того, она может обеспечить дистанциоиность управления, т. е. командная ось может находиться на некотором удалении от объекта и силовой части системы. Если же вместо проводной связи используются радиолинии, то удаление может быть значительным, что позволяет, например, управлять с Земли подвижными объектами, находящимися на Луне.
 , называемая инструментальной ошибкой. , называемая инструментальной ошибкой.

 . Но чтобы исполнительная ось вращалась, к . Но чтобы исполнительная ось вращалась, к

Наличие момеитной и скоростной ошибок обусловлено самим принципом действия замкнутой системы, которая реагирует не на задающее и возмущающие воздействия, а па отклонение управляемой величины от ее требуемого значения. Более детально ошибки систем рассматриваются в разделе П.
Кроме электромеханических следящих систем, существуют также электрогидравлические, электропневматические и чисто гидравлические или пневматические следящие системы в зависимости от вида применяемых в них усилительных и исполнительных устройств. Общий принцип действия во всех случаях остается тем же самым.
Входная и выходная величины следящей системы могут быть не только механические, как в примере на рис. 1.15; они могут иметь любую физическую природу. В соответствии с этим конструкции тоже могут быть весьма разнообразными.
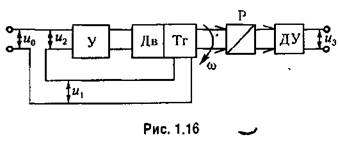
 подается извне и может изменяться. Если па выходе дополнительно поставить понижающий редуктор Р и датчик угла ДУ, то получится так называемый подается извне и может изменяться. Если па выходе дополнительно поставить понижающий редуктор Р и датчик угла ДУ, то получится так называемый
 , сама она представляет собой производную от угла поворота, а угол — интеграл от угловой скорости. Датчик угла измеряет угол поворота и выдает пропорциональное ему напряжение. Высокая точность интегрирования достигается за счет применения малоиперционных электрических двигателей со встроенными в их корпуса тахогеператорами. В настоящее время во многих областях техники существует необозримое количество самых разнообразных систем автоматического управления, использующих принцип следящих систем. Он применяется почти везде, где нужно добиться высокой точности и надежности автоматического управления. , сама она представляет собой производную от угла поворота, а угол — интеграл от угловой скорости. Датчик угла измеряет угол поворота и выдает пропорциональное ему напряжение. Высокая точность интегрирования достигается за счет применения малоиперционных электрических двигателей со встроенными в их корпуса тахогеператорами. В настоящее время во многих областях техники существует необозримое количество самых разнообразных систем автоматического управления, использующих принцип следящих систем. Он применяется почти везде, где нужно добиться высокой точности и надежности автоматического управления.
|
