Теория систем автоматического управленияКритерий устойчивости Найквиста
В 1932 году Найквист предложил принципиально новый критерий устойчивости. В отличие от критерия Гурвица, который устанавливает принадлежность корней к левой полуплоскости для любого полинома или алгебраического уравнения, критерий Найквиста предназначен для исследования устойчивости только замкнутых систем.
Критерий Найквиста — это графоаналитический критерий. Характерной его особенностью является то, что вывод об устойчивости или неустойчивости замкнутой системы делается в зависимости от вида амплитудно-фазовой (а. ф. х.) или логарифмических частотных характеристик (л. ч. х.) разомкнутой системы.
Помимо исследования устойчивости по виду указанных характеристик можно оценить и некоторые качественные показатели замкнутой системы, например, запас устойчивости. Более того, появляется возможность указать, как и за счет каких средств неустойчивая замкнутая система может быть сделана устойчивой и как можно повысить качество устойчивой замкнутой системы.
В главе 5 было введено понятие передаточной функции разомкнутой системы. Эта функция может быть представлена в виде


 получается частотная передаточная функция разомкнутой системы получается частотная передаточная функция разомкнутой системы

 Модуль частотной передаточной функции представляет собой отношение амплитуд выходной и входной величин: Модуль частотной передаточной функции представляет собой отношение амплитуд выходной и входной величин:

 зависит от зависит от
 . От частоты зависит и сдвиг фаз, или фаза: . От частоты зависит и сдвиг фаз, или фаза:
 и откладывать на комплексной плоскости точки, соответствующие получающимся комплексным числам, то геометрическое место этих точек образует амплитудно-фазовую характеристику разомкнутой системы (рис. 6.9). и откладывать на комплексной плоскости точки, соответствующие получающимся комплексным числам, то геометрическое место этих точек образует амплитудно-фазовую характеристику разомкнутой системы (рис. 6.9).
 и т.д. Вдоль кривой и т.д. Вдоль кривой
иногда рисуют стрелки, которые показывают направление возрастания частоты со (рис. 6.9).
 попадает в начало координат. попадает в начало координат.
 части. Однако, если порядок системы п > 2, удобнее использовать части. Однако, если порядок системы п > 2, удобнее использовать

 этой целью передаточную функции (6.19) целесообразно представить в так называемой стандартной форме: этой целью передаточную функции (6.19) целесообразно представить в так называемой стандартной форме:

 могут принимать любые значения от 0 до 1, могут принимать любые значения от 0 до 1,
Соответствующая (6.22) частотная передаточная функция разомкнутой системы имеет вид:

 — разности их аргументов. В свою очередь, модуль произведения комплексных чисел равен произведению модулей, а аргумент — сумме аргументов. Модули и аргументы, соответствующие сомножителям передаточной функции (6.22), приведены в табл. 6.1. — разности их аргументов. В свою очередь, модуль произведения комплексных чисел равен произведению модулей, а аргумент — сумме аргументов. Модули и аргументы, соответствующие сомножителям передаточной функции (6.22), приведены в табл. 6.1.
Сформулируем требования к а. ф. х. разомкнутой системы, при выполнении которых замкнутая система будет устойчивой. Ограничим вначале задачу и будем рас
 Ниже будет показано, что при определенных условиях первое ограничение может быть снято. Введем в рассмотрение вспомогательную функцию Ниже будет показано, что при определенных условиях первое ограничение может быть снято. Введем в рассмотрение вспомогательную функцию

 — характеристический полином замкнутой системы. — характеристический полином замкнутой системы.
 > и найдем комплекс > и найдем комплекс




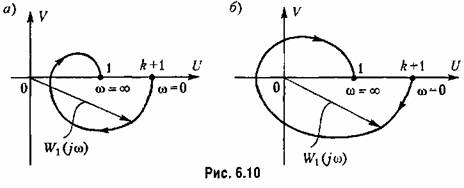
 не должен охватывать начало не должен охватывать начало
координат (рис. 6.10, а).

 , т. е, должна проходить так, как показано на рис. 6.11, а. , т. е, должна проходить так, как показано на рис. 6.11, а.
 Таким образом, аргумент изменяется на величину Таким образом, аргумент изменяется на величину

 угол поворота век- угол поворота век-
 имеется два корпя с положительной вещественной частью. имеется два корпя с положительной вещественной частью.
 Эта граница наиболее характерна для устойчивых Эта граница наиболее характерна для устойчивых
в разомкнутом состоянии систем. В этом случае, как следует из выражения (6.16),
 , а фаза , а фаза
 т. е. а. ф, х. разомкнутой системы (рис. 6.11, в) проходит через точку т. е. а. ф, х. разомкнутой системы (рис. 6.11, в) проходит через точку

 Тогда замкнутая система будет устойчивой, если Тогда замкнутая система будет устойчивой, если
 система система
 — это частота незатухающих колебаний, возникающих в системе (см. рис. 6.2, г). — это частота незатухающих колебаний, возникающих в системе (см. рис. 6.2, г).
 как видно из выражения (6.22), зависит от значений постоянных вре- как видно из выражения (6.22), зависит от значений постоянных вре-
 она становится неустойчивой. она становится неустойчивой.
В случае, изображенном на рис. 6.11, г, замкнутая система устойчива при сколь угодно большом значении коэффициента передачи ^разомкнутой системы. Однако практически всегда существуют неучтенные в передаточной функции (6.22) малые

постоянные времени, из-за чего реальная а. ф. х, разомкнутой системы будет такой, как показано пунктиром, а замкнутая система станет критичной к увеличению К.
На рис. 6.12 изображен более сложный случай, когда замкнутая система может стать неустойчивой как при увеличении, так и при уменьшении коэффициента передачи разомкнутой системы. При
 то замкнутая система вновь станет устойчивой. то замкнутая система вновь станет устойчивой.
 согласно (5.13) согласно (5.13)
 Поэтому система автоматического управления создается не для обеспечения устойчивости объекта, а для придания системе свойств, отличающихся от свойств объекта, например, для повышения точности поддержания управляемой величины (температуры, давления и т, п.) на заданном уровне при наличии возмущений. Однако если алгоритм управления и параметры управляющего устройства выбраны неправильно, то система автоматического управления может стать неустойчивой. Впервые такая ситуация возникла еще в XVIII в. при создании регуляторов скорости вращения валов паровых машин (см. рис. 1.12). И сразу же, как отмечено в § 6.2, появилась необходимость в разработке критериев устойчивости, Поэтому система автоматического управления создается не для обеспечения устойчивости объекта, а для придания системе свойств, отличающихся от свойств объекта, например, для повышения точности поддержания управляемой величины (температуры, давления и т, п.) на заданном уровне при наличии возмущений. Однако если алгоритм управления и параметры управляющего устройства выбраны неправильно, то система автоматического управления может стать неустойчивой. Впервые такая ситуация возникла еще в XVIII в. при создании регуляторов скорости вращения валов паровых машин (см. рис. 1.12). И сразу же, как отмечено в § 6.2, появилась необходимость в разработке критериев устойчивости,
 Будем полагать, что в нем кроме корней с отрицательными Будем полагать, что в нем кроме корней с отрицательными

 в знаменателе (6.23) появится со- в знаменателе (6.23) появится со-
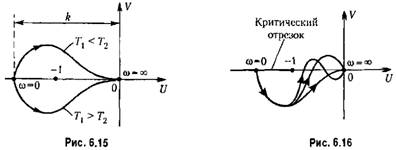
 т. е, амплитудно-фазовая характеристика разомкнутой системы будет иметь разрыв непрерывности (рис. 6.13, а). Для получения определенности в ходе т. е, амплитудно-фазовая характеристика разомкнутой системы будет иметь разрыв непрерывности (рис. 6.13, а). Для получения определенности в ходе
 модуль которого модуль которого


 начало которой начало которой
находится па вещественной оси, и разрыв непрерывности будет устранен. Кроме того, так как нулевой корень заменен вещественным отрицательным корнем, то разомкнутую систему можно считать устойчивой. Все это означает, что для исследования устойчивости замкнутой системы можно применять приведенную выше формулировку критерия Найквиста.
 (рис. 6.13, б). (рис. 6.13, б).

 . В этом случае (см. . В этом случае (см.
 — бесконечно малая положительная величина. Тогда разрыв устранится за счет дополнения а. ф. х. полуокружностью бесконечно большого радиуса по часовой стрелке так, как показано па рис. 6.14. — бесконечно малая положительная величина. Тогда разрыв устранится за счет дополнения а. ф. х. полуокружностью бесконечно большого радиуса по часовой стрелке так, как показано па рис. 6.14.
 .В случае рис. 6.14, б замкнутая система неустойчива. .В случае рис. 6.14, б замкнутая система неустойчива.
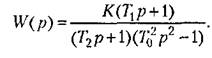
В качестве иллюстрирующего примера рассмотрим следящую систему, структурная схема которой изображена на рис. 6.4. Для этой системы была получена передаточная функция разомкнутой системы

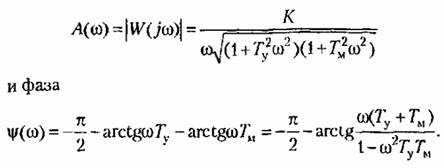
Модуль частотной передаточной функции разомкнутой системы (см. табл. 6.1)
 Это означает, что а, ф. х. разомкнутой системы рас- Это означает, что а, ф. х. разомкнутой системы рас-
 а. ф. х. выглядит так, как показано па рис, 6.13, а, а. ф. х. выглядит так, как показано па рис, 6.13, а,
 найдем из условия найдем из условия

Подставив это значение в выражение для модуля, получим:
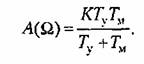
 . Таким образом, условие устойчивости замкнутой системы . Таким образом, условие устойчивости замкнутой системы

совпадает с найденным ранее условием, вытекающим из критерия Гурвица.
Обратимся теперь к более общему случаю, когда знаменатель передаточной функции разомкнутой системы содержит корпи, лежащие в правой полуплоскости. Это соответствует неустойчивой в разомкнутом состоянии системе.
Появление неустойчивости разомкнутой системы может вызываться двумя причинами. Во-первых, это может быть следствием наличия неустойчивых звеньев, подобных рассмотренным в § 4.8, в том числе и неустойчивости самого управляемого объекта. Во-вторых, это может быть следствием потери устойчивости звеньев, охваченных положительными или отрицательными обратными связями (см., например, рис. 5.4).
 должен составить должен составить

 на угол 1п против часовой стрелки. Приведенная ранее формулировка критерия Найквиста для случая, когда l = 0, вытекает отсюда как частный случай. на угол 1п против часовой стрелки. Приведенная ранее формулировка критерия Найквиста для случая, когда l = 0, вытекает отсюда как частный случай.
Таким образом, при использовании критерия Найквиста необходимо проверить, имеются ли в знаменателе передаточной функции разомкнутой системы корни, лежащие в правой полуплоскости, и сколько имеется таких корней.
Если в системе имеются местные обратные связи, например, такого типа, как это изображено па рис. 5.6, то необходимо убедиться в том, что но цепи местной обратной связи не нарушена устойчивость при разомкнутой главной обратной связи. Проверка устойчивости но цени местной обратной связи может быть сделана посредством использования любых критериев устойчивости, в том числе и посредством критерия Найквиста, который может применяться для разомкнутой местной обратной связи обычным путем построения для этой цели амплитудно-фазовой характеристики.
В случае, если для местной обратной связи будет получено указание на ее неустойчивость, необходимо определить число корней, лежащих в правой полуплоскости.
Следует заметить, что, хотя теоретически вся система в замкнутом состоянии может быть устойчивой при наличии неустойчивости по цепи местной обратной связи, практически такой случай является нежелательным и его надо избегать, стремясь использовать только устойчивые местные обратные связи. Поэтому, как правило, при расчете системы выбирают такие местные обратные связи, которые были бы устойчивыми при разомкнутой главной обратной связи.
В качестве примера рассмотрим систему угловой стабилизации ракеты, структурная схема которой изображена па рис. 6.5. Для этой системы была получена передаточная функция разомкнутой системы
 имеется два вещественных отрицательных корня имеется два вещественных отрицательных корня
 свидетельствует о неустойчивости управляемого объекта (ракеты) и разомкнутой системы в целом. Поэтому система автоматического управления создается, в первую очередь, для обеспечения устойчивого полета ракеты. свидетельствует о неустойчивости управляемого объекта (ракеты) и разомкнутой системы в целом. Поэтому система автоматического управления создается, в первую очередь, для обеспечения устойчивого полета ракеты.
 против часовой стрелки. против часовой стрелки.
Для построения а. ф. х. находим модуль и фазу (см. табл. 6.1)
 до до
 Эти условия совпадают с найденными ранее при помощи критерия Гурвица. Эти условия совпадают с найденными ранее при помощи критерия Гурвица.

 — число корней с положительной вещественной частью в характеристическом полиноме разомкнутой системы. При этом переход сверху вниз считается положительным (+1), а снизу вверх — отрицательным (-1). — число корней с положительной вещественной частью в характеристическом полиноме разомкнутой системы. При этом переход сверху вниз считается положительным (+1), а снизу вверх — отрицательным (-1).
 . Сумма переходов равна нулю и замкнутая система устойчива. . Сумма переходов равна нулю и замкнутая система устойчива.
Сделаем теперь замечание, касающееся использования для определения устойчивости замкнутой системы передаточной функции разомкнутой системы.
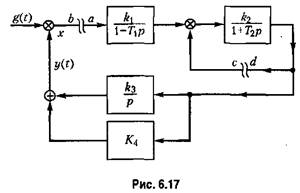
В случае многоконтурной системы управления размыкание ее для получения передаточной функции разомкнутой системы можно делать, вообще говоря, в произвольном месте. Рассмотрим, например, систему, структурная схема которой изображена на рис. 6.17.
Разомкнем систему на входе первого звена. Тогда, рассматривая точку а как вход, а точку b как выход, получаем передаточную функцию разомкнутой системы

Разомкнем теперь ту же систему не па входе первого звена, а в цепи обратной связи второго звена (точка с соответствует входу, а точка (I — выходу). Передаточная функция разомкнутой системы в этом случае


Поэтому для определения устойчивости можно пользоваться передаточной функцией разомкнутой системы, полученной размыканием исходной системы в произвольной точке, в которой выполняется условие детектирования.
 связывает между собой изображения управляемой величины и ошибки, и только она связана с передаточной функцией замкнутой системы Ф(р) известным соотношением связывает между собой изображения управляемой величины и ошибки, и только она связана с передаточной функцией замкнутой системы Ф(р) известным соотношением
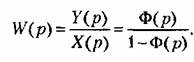
Передаточную функцию при размыкании на входе первого звена в дальнейшем будем считать главной передаточной функцией разомкнутой системы и именно ее иметь в виду при рассмотрении методов определения качества управления и синтеза систем управления.
|
