Теория систем автоматического управленияУравнения систем с нелинейностью релейного типа
Следуя сделанным в § 16.1 замечаниям, приведем несколько примеров составления уравнений нелинейных систем релейного типа.
Система автоматической стабилизации напряжения. Пусть имеется генератор постоянного тока (управляемый объект) с вибрационным регулятором напряжения. Упрощенная принципиальная схема такой системы показана на рис. 16.16.

Уравнение объекта (генератора) представим в линейном виде:

 определяются параметрами якоря и цепи возбуждения, определяются параметрами якоря и цепи возбуждения,
Уравнение чувствительного элемента (обмотки электромагнита 2) запишем в виде

 будет определено ниже. будет определено ниже.
 — токи полного срабатывания и отпускания реле. Для составления уравнения такого нелинейного звена удобно, как — токи полного срабатывания и отпускания реле. Для составления уравнения такого нелинейного звена удобно, как
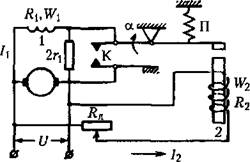
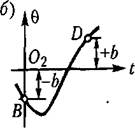
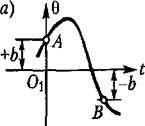
Рис. 16.16
Рис. 16.17
 Как указано па рис. 16.17,(2, принимаем Как указано па рис. 16.17,(2, принимаем

Тогда характеристика данного нелинейного звена в отклонениях примет вид рис. 16.17, 6, симметричный относительно начала координат (релейная характеристика с
гистерезисной петлей).
В связи с этим уравнение нелинейного звена (рис. 16.17,6) будет

 причем в точках Си О происходит переключение реле (перескоки в точки Ей В соответственно). причем в точках Си О происходит переключение реле (перескоки в точки Ей В соответственно).
 объединим водно: объединим водно:

Постоянные значения, от которых производится здесь отсчет отклонений переменных, определяются из алгебраических уравнений условного номинального установившегося режима

с использованием реальных характеристик генератора.
Система автоматической стабилизации курса торпеды. Возьмем простейшую схему. Уравнение вращения торпеды вокруг вертикальной оси (рыскание по курсу) как управляемого объекта запишем приближенно в виде


момент руля; 5 — угол поворота руля.
 получим уравнение объекта в виде получим уравнение объекта в виде

где5 — величина перемещения заслонки из нейтрального положения.
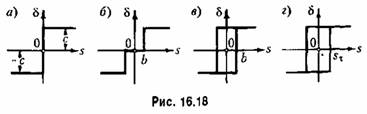
Будем считать, что поршень рулевой машинки при открытии заслонки, быстро получая полную скорость, мгновенно (точнее, за такое малое время, в течение которого торпеда не успевает заметно повернуться, т. е. много меньшее возможного периода колебаний торпеды) перебрасывает руль из одного крайнего положения в другое.

Рулевая машинка вместе с рулем (привод и управляющий орган) представляет собой нелинейное звено, уравнение которого согласно вышесказанному можно представить либо в простейшем виде (рис. 16.18, а)

либо, если имеется заметная зона нечувствительности (рис. 16.18, б), в виде

либо, если существенное значение имеет гистерезисная петля (рис. 16.18, в),

либо, наконец, в простейшем случае, по с запаздыванием (рис. 16.18, г)

где
причем т — время запаздывания срабатывания реле.
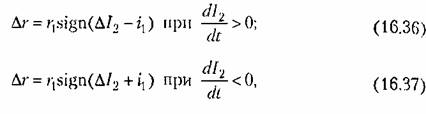
антов в зависимости от того, какой из них лучше будет соответствовать свойствам данной релейной системы.
|
