Теория систем автоматического управленияМетоды повышения запаса устойчивости
Повышение запаса устойчивости или демпфирование системы управления сводится в конечном счете к рациональному перераспределению полюсов и нулей передаточной функции замкнутой системы для задающего или возмущающего воздействия. Передаточная функция замкнутой системы связана с передаточной функцией разомкнутой системы жестким соотношением. Поэтому под демпфированием можно понимать также рациональное перераспределение полюсов и нулей передаточной функции разомкнутой системы.
Ответить на вопрос, каким образом необходимо перераспределить полюсы и нули передаточной функции замкнутой или разомкнутой системы, можно на основании применения критериев устойчивости и критериев качества. Наиболее полно этот вопрос решается при помощи синтеза корректирующих средств.
Здесь будут рассмотрены только основные идеи, которые используются при изменении динамических свойств системы с целью повышения запаса устойчивости. Рассмотрение может вестись на основании различных критериев качества Здесь это будет сделано па наиболее наглядных приерах, использующих амплитудно-фазовую характеристику разомкнутой системы,

Деформация амплитудно-фазовой характеристики с целью получения устойчивости, а также запаса устойчивости может производиться посредством использования корректирующих звеньев различного типа: последовательных, параллельных и обратных связей. Так как в линейной системе для каждого звена какого-либо типа может быть найдено эквивалентное звено другого тина, то достаточно рассмотреть действие звеньев одного определенного типа. Наиболее наглядно может быть прослежено действие последовательных корректирующих звеньев, и для них наиболее просто могут быть вычислены требуемые параметры. Поэтому в дальнейшем в основном будут рассматриваться последовательные корректирующие звенья.
Деформация амплитудно-фазовой характеристики может быть произведена четырьмя основными способами, которые будут рассмотрены ниже в отдельности.
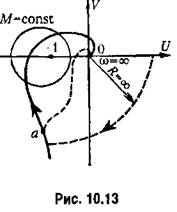
 , соответствующую некоторой точке а па характеристике. Тогда амплитудно-фазовая характеристика примет вид, изображенный на рис. 10.13 пунктиром. Как видно из этого рисунка, деформированной характеристике будет соответствовать замкнутая система, которая является не только устойчивой, но и имеющей необходимый запас устойчивости, , соответствующую некоторой точке а па характеристике. Тогда амплитудно-фазовая характеристика примет вид, изображенный на рис. 10.13 пунктиром. Как видно из этого рисунка, деформированной характеристике будет соответствовать замкнутая система, которая является не только устойчивой, но и имеющей необходимый запас устойчивости,
Подавление усиления на высоких частотах всегда сопровождается появлением отрицательных фазовых сдвигов. Поэтому этот метод демпфирования может также называться демпфированием с внесением отрицательных фазовых сдвигов.
Подавление высоких частот может осуществляться различными способами. Наиболее просто это получается при введении последовательно в цепь управления апериодического звена первого порядка с относительно большой постоянной времени и коэффициентом передачи к = 1. Передаточная функция такого звена

Легко показать, что подобное звено может всегда привести к получению желаемого запаса устойчивости в статических системах с минимально-фазовыми звеньями. Пусть, например, передаточная функция разомкнутой статической системы имеет вид

 отличны от нуля. отличны от нуля.
 . Тогда имеет место -1 переход через критический отрезок и замкнутая система неустойчива. . Тогда имеет место -1 переход через критический отрезок и замкнутая система неустойчива.
 будет мало отличаться от своей первой асимптоты, а будет мало отличаться от своей первой асимптоты, а
 выберем так, чтобы частота среза выберем так, чтобы частота среза
 появится асимптота, появится асимптота,
 делает все остальные постоянные времени относительно малыми, в результате чего и достигается эффект демпфирования. делает все остальные постоянные времени относительно малыми, в результате чего и достигается эффект демпфирования.

 Для этого нужно только выполнить условие Для этого нужно только выполнить условие

Демпфирование статических систем может быть осуществлено и более сложными корректирующими звеньями, вносящими подавление высоких частот и отрицательные фазовые сдвиги, например при помощи пассивного интегрирующего звена (табл. 10.1) или его аналогов (табл. 10.3).
Также можно показать, что в астатических системах первого порядка, состоящих из минимально-фазовых звеньев, желаемый запас устойчивости может быть всегда получен при введении последовательного пассивного интегрирующего звена, имеющего передаточную функцию вида

 результирующая передаточная функция разомкнутой системы с любой степенью точности может быть представлена в виде произведения (10.36) и сомножителя К/р, а постоянные времени системы оказываются относительно малыми. В астатических системах второго порядка требуемый запас устойчивости может быть получен при помощи подавления высоких частот только в некоторых случаях. Достоинством демпфирования с подавлением высоких частот является то, что система оказывается менее подверженной действию высокочастотных помех, так как корректирующее звено представляет собой фильтр низких частот. результирующая передаточная функция разомкнутой системы с любой степенью точности может быть представлена в виде произведения (10.36) и сомножителя К/р, а постоянные времени системы оказываются относительно малыми. В астатических системах второго порядка требуемый запас устойчивости может быть получен при помощи подавления высоких частот только в некоторых случаях. Достоинством демпфирования с подавлением высоких частот является то, что система оказывается менее подверженной действию высокочастотных помех, так как корректирующее звено представляет собой фильтр низких частот.
Недостатком демпфирования с подавлением высоких частот является то, что снижение полосы пропускания системы означает понижение быстродействия. Поэтому такой метод демпфирования может применяться в тех случаях, когда снижение быстродействия системы является допустимым.
|
