Теория систем автоматического управленияПрограммы и алгоритмы управления
Программы управления
Одной из задач системы автоматического управления является, как уже говорилось, поддержание требуемого значения управляемой величины у или изменение се но определенной программе, которая либо заранее задается, либо поступает извне во время эксплуатации системы в зависимости от некоторых условий.
Программы могут быть временными (задаваемыми во времени):

или параметрическими (задаваемыми в текущих координатах):

 — какие-либо физические величины, характеризующие текущее состояние объекта в процессе управления. — какие-либо физические величины, характеризующие текущее состояние объекта в процессе управления.
Примером временной программы может служить программа изменения управляемой величины, обеспечивающая правильный режим начального разгона объекта при пуске его в ход до наступления режима нормальной эксплуатации, в котором объект затем будет работать длительное время.

Например, система стабилизации угловой скорости мощного двигателя может быть предназначена не только для поддержания постоянной скорости в режиме нормальной эксплуатации, но еще и для обеспечения требуемого режима нарастания скорости во времени (рис. 2.1, где у — угловая скорость) при пуске двигателя в ход, чтобы избежать каких-либо опасных отклонений.
Аналогичная программа управления во времени может задаваться при термической обработке металлов, когда требуется определенный режим быстроты нагревания металла (рис. 2.1, где у — температура в
 при которой металл затем будет выдерживаться в печи. при которой металл затем будет выдерживаться в печи.
 , может быть в определенных пределах произвольным. , может быть в определенных пределах произвольным.
Примером параметрической программы может служить задание требуемого переменного значения высоты полета у (рис. 2.3) при снижении летательного аппарата, но не во времени, а в зависимости от текущего значения пройденного пути 5, чтобы снизиться в определенную точку независимо от времени протекания этого процесса.
 — высота). — высота).
Наконец, типичным примером параметрических программ являются так называемые заколы наведения в системах телеуправления и самонаведения снарядов. Законом наведения называется особая программа управления, которая задается через текущие значения координат и скоростей управляемого объекта независимо от того, в какой момент времени они имеют место в процессе движения объекта.
Пусть, например, тело А (рис. 2.4) должно быть сближено с телом В для мягкого контакта; р — текущее относительное расстояние между ними. Условия, которые должны быть выполнены в процессе сближения, следующие:

где Т — время сближения; условие (2.2) — условие мягкого контакта в конце сближения; условия (2.1), (2.3) должны выполняться в течение всего процесса сближения,
 связано с ограничением мощности или силы управляющего воздействия. Представим закон наведения в виде связано с ограничением мощности или силы управляющего воздействия. Представим закон наведения в виде

Таким образом, в системе управления должны быть измерители величин р и р и устройство формирования сигнала


 при котором при котором
уравнение (2.5) имеет вид

 Следовательно, линейный закон наведения не годится. Следовательно, линейный закон наведения не годится.
 Тогда нелинейный закон на- Тогда нелинейный закон на-
ведения (2.5) будет иметь вид


 Если же Если же

 уменьшается в процессе наведения с уменьшением р. уменьшается в процессе наведения с уменьшением р.
В результате приемлемым оказывается нелинейный закон наведения (2.8) при значении b в интервале (2.9). Конкретизация значения b внутри этого интервала может производиться на основании каких-либо других требований применительно к каждой конкретной технической системе.

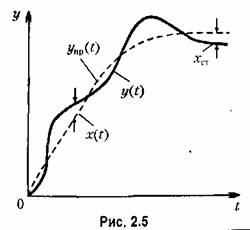

 будет осуществляться системой! управления неизбежно с некоторыми ошибками, как показано на рис. 2.5. Ошибка системы (рассогласование) будет осуществляться системой! управления неизбежно с некоторыми ошибками, как показано на рис. 2.5. Ошибка системы (рассогласование)


Понятие динамическая ошибка является очень широким. В него включаются все виды ошибок систем автоматического управления, которые имеют место в динамических процессах, т. е. при меняющихся внешних воздействиях (возмущающих или управляющих) и во всех случаях переходных процессов. Различные виды этих ошибок и способы их уменьшения будут предметом изучения во всех дальнейших главах книги.
Величины динамических и статических ошибок управления в очень сильной степени зависят от структуры управляющего устройства, определяющей так называемый алгоритм управления.
|
