Теория систем автоматического управленияКоэффициенты ошибок
 воздействий. Не снижая общности рассуждений, рассмотрим случай, когда имеется только задающее воздействие. воздействий. Не снижая общности рассуждений, рассмотрим случай, когда имеется только задающее воздействие.
 имеет произвольную форму, по достаточно плавную вдали от начальной точки процесса в том смысле, что через некоторое время существенное значение имеет только конечное число т производных имеет произвольную форму, по достаточно плавную вдали от начальной точки процесса в том смысле, что через некоторое время существенное значение имеет только конечное число т производных
то ошибку системы можно определить следующим образом. Из формулы (5.19) можно найти изображение ошибки

 изображение задающего воздействия. изображение задающего воздействия.
Разложим передаточную функцию по ошибке в выражении (8,18) в ряд по возрастающим степеням комплексной величины р:

сходящийся при малых значениях р, т. е. при достаточно больших значениях времени С, что соответствует установившемуся процессу изменения управляемой величины при заданной форме задающего воздействия.
 Переходя в выражении (8.19) к оригиналу, получаем формулу для установившейся ошибки Переходя в выражении (8.19) к оригиналу, получаем формулу для установившейся ошибки

 ... называются коэффициентами ошибок. Они могут определяться согласно общему правилу разложения функции в ряд Тейлора по формулам ... называются коэффициентами ошибок. Они могут определяться согласно общему правилу разложения функции в ряд Тейлора по формулам

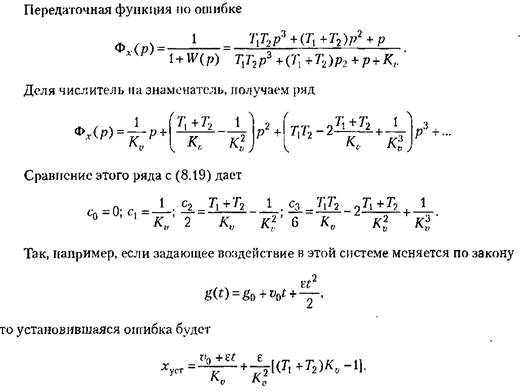
Так как передаточная функция по ошибке представляет собой дробно-рациональную функцию, то коэффициенты ошибок можно более просто получить делением числителя на знаменатель и сравнением получающегося ряда с выражением (8.19).
 может быть отличным от нуля только в статических системах и то только в тех случаях, когда не принимаются меры по устранению первой составляющей статической ошибки посредством масштабирования или использования неединичных обратных связей (см. § 9.3). может быть отличным от нуля только в статических системах и то только в тех случаях, когда не принимаются меры по устранению первой составляющей статической ошибки посредством масштабирования или использования неединичных обратных связей (см. § 9.3).
 связан с добротностью по скорости соотношением связан с добротностью по скорости соотношением
В системах с астатизмом второго порядка

 связан с добротностью по ускорению соотношением связан с добротностью по ускорению соотношением

При исследовании ошибки от возмущающего воздействия можно получить все коэффициенты не равными нулю при астатизме любого порядка, так как астатизму по задающему воздействию может соответствовать наличие статической ошибки по возмущению.
 когда можно пренебречь влиянием переходной составляющей процесса и рассматривать только вынужденное движение системы. когда можно пренебречь влиянием переходной составляющей процесса и рассматривать только вынужденное движение системы.
Пример. Определим первые три коэффициента ошибки по задающему воздействию, если передаточная функция разомкнутой системы имеет вид
 замкнутая система становится неустойчивой. замкнутая система становится неустойчивой.
|
