Теория систем автоматического управленияПример учета нелинейности измерителя управляемой величины
На основании вышеизложенных теорем Ляпунова М. А. Айзермаи показал, что если уравнение системы содержит нелинейность

 как изображено, например, на рис. 17.14, а. как изображено, например, на рис. 17.14, а.
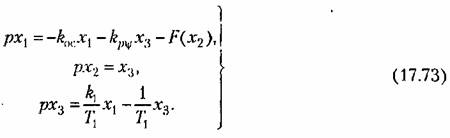
 ) имеет нелинейную характеристику, в результате чего получается нелинейное уравнение автопилота ) имеет нелинейную характеристику, в результате чего получается нелинейное уравнение автопилота

где

 — нелинейная функция, например, вида рис. 17.14, б. — нелинейная функция, например, вида рис. 17.14, б.
Введем обозначения переменных;

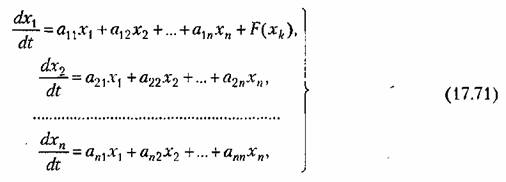
Тогда уравнения автопилота (17.72) и самолета (17.55) примут вид (17.71), а именно:
Зададимся функцией 7в виде

где все шесть коэффициентов b неизвестны. Потребуем, чтобы функция

 в уравнениях (17.73) имела вид в уравнениях (17.73) имела вид

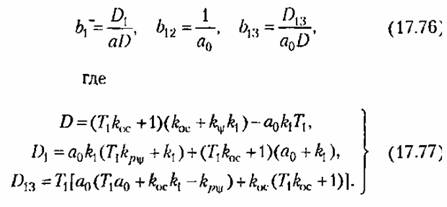
Тогда путем приравнивания соответствующих коэффициентов выражений (17.74) и (17.75) можно найти все шесть величин b из системы шести алгебраических уравнении. Здесь приводится результат решения только для трех коэффициентов, которые понадобятся в дальнейшем, а именно:
Затем потребуем, чтобы выражение (17.74) при замене в уравнениях (17.73)
 имело вид имело вид

Функция W будет знакоопределеннойй отрицательной, как требуется по условию, если

Эти неравенства с учетом (17.78) приводятся к сле71ующему:

 где где

 . Нетрудно проверить, . Нетрудно проверить,
 (рис. 17.14, б), так как характеристическое уравнение согласно (17.55) и (17.72) в этом случае будет (рис. 17.14, б), так как характеристическое уравнение согласно (17.55) и (17.72) в этом случае будет


Как и в предыдущем примере, здесь получаются условия абсолютной устойчивости, т. е. условия, не зависящие от формы нелинейности, но в более узких, чем (17.54), пределах, показанных на рис. 17.14, б. Точные аналитические методы исследования релейных систем рассмотрены в работах и др.
|
