Теория систем автоматического управленияСистема автоматического управления с переменным коэффициентом усиления
В ряде случаев для повышения качества процесса бывает желательно, чтобы воздействие на управляющий орган было не пропорциональным отклонению управляемой величины, а усиливалось или ослаблялось при увеличении этого отклонения (нелинейный алгоритм управления). Примерами такого воздействия с переменным коэффициентом усиления могут служить характеристики с ограниченной линейностью или с насыщением (рис. 16.22, а). Однако они дают уменьшение коэффициента усиления при увеличении отклонения. Рассмотрим теперь два примера характеристик с переменным коэффициентом усиления, который увеличивается при увеличении отклонения. Уравнение нелинейной части привода управляющего органа будет в случае характеристики рис. 16.24, а

а в случае характеристики рис. 16.24,6

Все рассмотренные примеры иллюстрируют случай, когда общая схема системы имеет вид рис. 16.1, т. е. случай нелинейной системы (кроме случая сухого трения в следящей системе при наличии остановок). Комбинации нелинейностей приводят к нелинейным системам второго и третьего классов.

Система автоматического управления с логическим устройством. Пусть динамика управляемого объекта (рис. 16.25) описывается уравнением
Уравнение усилителя-преобразователя с: логическим устройством

Уравнение исполнительного устройства

 которая может быть назначена или синтезирована в очень разнообразных формах для обеспечения простоты и надежности аппаратуры, наибольшего быстродействия, наименьшей затраты энергии на управление, учета ограничения мощности источника энергии и специфики желательных режимов его работы и т: п. которая может быть назначена или синтезирована в очень разнообразных формах для обеспечения простоты и надежности аппаратуры, наибольшего быстродействия, наименьшей затраты энергии на управление, учета ограничения мощности источника энергии и специфики желательных режимов его работы и т: п.

 Не работает оно также и при Не работает оно также и при
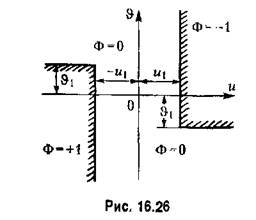

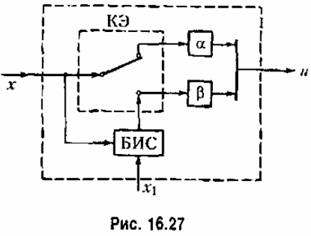
Система с переменной структурой. Как уже указывалось в главе 2 системы с переменной структурой содержат в себе специальное переключающее устройство для изменения управляющего устройства, которое срабатывает в зависимости от размеров и знаков входных величин.
 виде виде

Функция |/ может строиться по-разному. Например,

Основная характерная нелинейность здесь состоит в самом факте автоматически го переключения в зависимости от состояния входных величин.
|
