Теория систем автоматического управленияДинамические звенья и их характеристики
Общие понятия
Как уже было сказано, для расчета различных систем автоматического управления они обычно разбиваются на динамические звенья. Под динамическим звеном понимают устройство любой физической природы и конструктивного оформления, по описываемое определенным дифференциальным уравнением/
Классификация звеньев производится именно по виду дифференциального уравнения. Одним и тем же уравнением могут описываться весьма разнообразные устройства (механические, гидравлические, электрические и т. д.). Для теории автоматического управления это будет один и тот же тин звена. Конкретные же элементы автоматических систем, их теория, конструкция и расчеты излагаются в соответствующих учебниках и руководствах.
 (рис. 4.1). Возмущение, действующее на звено, в соответствии с изложенным (рис. 4.1). Возмущение, действующее на звено, в соответствии с изложенным
 , Статическая характеристика любого звена , Статическая характеристика любого звена
может быть изображена прямой линией (рис. 4.2), так как пока будут рассматриваться линейные или, точнее, линеаризованные системы.
В звеньях позиционногоу или статического, типа линейной

 связаны выходная и входная величины в связаны выходная и входная величины в
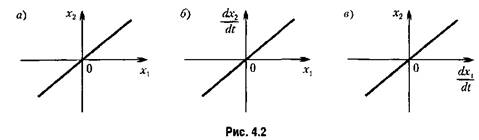
установившемся режиме (рис. 4.2, а). Коэффициент пропорциональности к между выходной и входной величинами представляет собой коэффициент передачи звена.
 связаны связаны

 связаны в установившемся режиме выходная величина и производная входной (рис. 4.2. в), откуда и произошло название этого тина звеньев. Коэффициент пропорциональности к является коэффициентом передачи звена. Если входная и выходная величины имеют одинаковую размерность, то коэффициенту передачи в этом случае соответствует размерность [с]. связаны в установившемся режиме выходная величина и производная входной (рис. 4.2. в), откуда и произошло название этого тина звеньев. Коэффициент пропорциональности к является коэффициентом передачи звена. Если входная и выходная величины имеют одинаковую размерность, то коэффициенту передачи в этом случае соответствует размерность [с].
Классификация звеньев, как уже отмечалось, производится по виду дифференциального уравнения или, что то же самое, по виду передаточной функции звена. Предположим, что звено, изображенное на рис. 4.1, описывается дифференциальным уравнением, представленным в стандартной форме:

 входная и входная и
 может быть найдена передаточная функция звена как отношение изображений по Лапласу выходной и входной величин: может быть найдена передаточная функция звена как отношение изображений по Лапласу выходной и входной величин:

 — постоянная времени. • — постоянная времени. •
При известной передаточной функции выходная величина (точнее, ее изображение но Лапласу) может находиться из выражения

 . Тогда искомая передаточная функция будет равна отношению изображений выходной величины и внешнего возмущения: . Тогда искомая передаточная функция будет равна отношению изображений выходной величины и внешнего возмущения:

В дальнейшем изложении для характеристики звена будет использоваться в основном передаточная функция, так как именно она дает связь между входной и выходной величинами, что необходимо знать при использовании того или иного звена в автоматической системе.
В соответствии с этим в табл. АЛ приведены передаточные функции десяти разновидностей так называемых типовых динамических звеньев. Под типовым звеном понимается такое звено, которое описывается дифференциальным уравнением не выше второго порядка. Характеристики типовых звеньев рассматриваются более подробно ниже.
В табл. 4.1 не приводятся сведения о большой группе так называемых корректирующих звеньев, используемых для улучшения динамических качеств автоматических систем. Эти звенья будут рассмотрены в главе 10.
|
