РадиоведениеРаспознавание объектов
Задача распознавания сводится к селекции (выделению) заданных для вскрытия объектов среди других обнаруженных объектов естественного и искусственного происхождения. В задачу распознавания входит также определение класса и типа выделенных объектов и их функционального состояния. Особенно важной и ответственной задачей при принятии решения является распознавание специальных ложных целей (надувных макетов, уголковых отражателей и т.п.), а также объектов по принадлежности свой - чужой.
Повышение эффективности решения задачи распознавания объектов достигается двумя путями:
повышением информативности используемых распознавательных признаков (характеристик) объекта;
формированием в РСА новых распознавательных признаков заданных объектов.
Обычно критерием выбора распознавательных признаков и методов повышения их эффективности является принцип разумной достаточности, так как формирование новых и повышение характеристик используемых признаков требует перераспределения (расходования) располагаемых ресурсов (вычислительных, энергетических, временных) РСА, которые всегда ограничены критическими технологиями и тактическими требованиями.
Быстрое развитие технологий РСА позволяет использовать распознавательные признаки все более широкого класса. Далее анализируются основные распознавательные признаки объектов при их наблюдении РСА.
Характерные размеры РЛИ объекта. К характерным размерам объекта относятся его длина, ширина, высота, площадь и объем, определяемые числом элементов разрешения в РЛИ объекта. Дополнительным признаком является форма РЛИ объекта.
Рассмотрим методику расчета вероятности распознавания цели на примере использования площади объекта в качестве распознавательного признака. Вероятность распознавания целей определяется многими факторами:
ансамблем распознаваемых целей;
априорными сведениями о классе наблюдаемых целей;
свойствами выбранных распознавательных признаков;
алгоритмом принятия решения о классе цели.
В качестве ансамбля распознаваемых целей принимается набор типовых целей. При этом каждый раз при определении вероятности распознавания целей предполагается наличие двух целей с наиболее близкими параметрами, т.е. наихудший случай. Кроме того, полагаем, что априорные сведения о наличии той или иной цели отсутствуют, т.е. наличие двух близких по параметрам целей равновероятно.
 такая точность достигается с запасом. такая точность достигается с запасом.
 - о классе цели №2. - о классе цели №2.
 пиксела), одинаковых заданных потерях при ошибках классификации первого и второго рода, отсутствии потерь при точных решениях и одинаковых априорных вероятностях появления целей каждого класса значение площади раздела равно: пиксела), одинаковых заданных потерях при ошибках классификации первого и второго рода, отсутствии потерь при точных решениях и одинаковых априорных вероятностях появления целей каждого класса значение площади раздела равно:


правильной классификации первой цели равна :
 то то

 площади изображения цели можно аппроксимировать гауссовой кривой: площади изображения цели можно аппроксимировать гауссовой кривой:


 при наблюдении первой цели определяется интегралом вероятности: при наблюдении первой цели определяется интегралом вероятности:

 - нормированное граничное значение разделения - нормированное граничное значение разделения
площади первой цели относительно второй.
 и и

для различных нормированных значений границы раздела
 : :


 вероятность распознавания будет равна 0,7. вероятность распознавания будет равна 0,7.
 на характерном размере изображения. В табл. 7.4 даны значения требуемой разрешающей способности РСА для обнаружения и распознавания типовых объектов при наблюдении их РЛИ опытным оператором. на характерном размере изображения. В табл. 7.4 даны значения требуемой разрешающей способности РСА для обнаружения и распознавания типовых объектов при наблюдении их РЛИ опытным оператором.
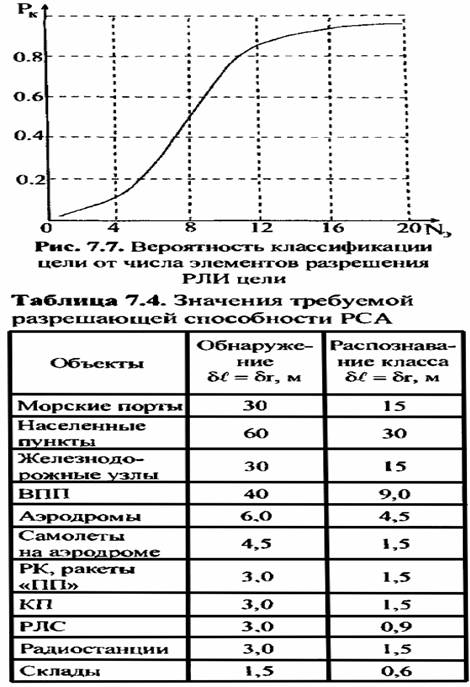
В настоящее время достигнута разрешающая способность 0,3x0,3 м, а в отдельных
экспериментах даже 0,1x0,1 м,
что позволяет распознавать малоразмерные цели, имеющие размеры единицы метров.
Решение задачи селекции ложных целей, имеющих такие же характерные размеры, как и заданные цели, требует привлечения дополнительных распознавательных признаков.
Амплитудный портрет объекта. Амплитудный портрет - это детальное изображение объекта в виде распределения ЭПР объекта по элементам разрешения РЛИ. В качестве распознавательных признаков используются статистические характеристики ЭПР.
Среднее значение ЭПР, полученное усреднением реализации амплитуды РЛИ за несколько обзоров , характеризует распределение отражающей способности объекта по элементам разрешения.
Корреляционная функция характеризует взаимосвязь амплитуд РЛИ как в разрешаемом элементе от обзора к обзору, так и между элементами. Рассматриваются также законы распределения плотности вероятности амплитуд РЛИ.
Трудностью использования этих признаков является получение банка данных для заданного класса (типов) объектов, что требует больших экспериментальных работ. Рассматривается также возможность расчета на ЭВМ статистических характеристик РЛИ объектов.
Поляризационные портреты объекта. В настоящее время при распознавании объекта используются в основном однополяризационные функции отражения, когда излучаемая и принимаемая электромагнитная волна имеет одну и ту же поляризацию (ГГ или ВВ). Развитие техники антенн-поляриметров дало возможность формировать полную поляризационную матрицу функции отражения объекта. При этом РЛИ объекта, полученные при различных поляризациях, несут информацию о конструкции и структуре материала объекта. Так, значительно отличаются РЛИ объектов естественного и искусственного происхождения в зависимости от поляризации, а также у специальных ложных целей.
Основной проблемой при создании полнополяриметрической РСА является значительное усложнение аппаратной и программной (алгоритмической) частей. Фактически работают параллельно четыре канала приема сигнала и обработки данных. Также весьма сложной задачей является определение (в основном экспериментальное) поляризационной матрицы функции отражения объектов для различных условий наблюдения.
Трехмерный портрет объекта. Обычно РЛИ объекта формируется в виде плоской картины в проекции на земную поверхность. В то же время значительная информация о классе и типе объекта заключена в высоте объекта. Кроме естественного изменения высоты земной поверхности (рельефа местности), РСА позволяет получать изображение микрорельефа объекта, т.е. изменение рельефа местности, связанное с наличием вскрываемого объекта (капониры, карьеры, отдельные сооружения, техника и т.п.).
 - угол визирования (в радианах). Так, при угле визирования в 6° объект высотой Ь = 10 м дает тень длиной 100 м. - угол визирования (в радианах). Так, при угле визирования в 6° объект высотой Ь = 10 м дает тень длиной 100 м.
При средних и больших углах визирования, а также при сложном характере рельефа Земли в районе объекта метод радиолокационных теней не работает. Поэтому для измерения высоты объекта используют угломерный способ с помощью реальной антенны РСА. Чем больше размер антенны, тем выше точность измерения высоты. Для упрощения конструкции антенны обычно используют две разнесенных в угломестной плоскости антенны (интерферометр). Разность фаз сигналов одного и того же разрешаемого по дальности и азимуту элемента объекта, принимаемых антеннами интерферометра, пропорциональна высоте объекта. По этой информации строится трехмерный портрет объекта.
Основным направлением развития таких интерферометрических РСА является повышение точности измерения высоты. Для этого увеличивают разнос антенн. Так, в экспериментальных РСА получена точность измерения высоты рельефа местности 0,3 м с дискретностью изображения 1...3 м.
Для уменьшения влияния растительности, покрывающей объекты, интерферометрическая РСА может работать в дециметровом диапазоне.
 Рассматриваются также сверхширокополосные системы в диапазонах 215...900 МГц и 100...600 МГц, которые могут работать в двух поддиапазонах дециметровом и метровом - с полосой частот 100 МГц. На малых дальностях (единицы километров) обеспечивается высокое разрешение по азимуту и дальности, что позволяет получать детальные изображения объектов в различных диапазонах волн. Рассматриваются также сверхширокополосные системы в диапазонах 215...900 МГц и 100...600 МГц, которые могут работать в двух поддиапазонах дециметровом и метровом - с полосой частот 100 МГц. На малых дальностях (единицы километров) обеспечивается высокое разрешение по азимуту и дальности, что позволяет получать детальные изображения объектов в различных диапазонах волн.
Динамический портрет объекта. Движение объекта и его отдельных частей является одним из самых важных распознавательных признаков, который лежит в основе не только распознавания класса и типа, но и функционального состояния объекта.
Задача формирования динамического портрета отдельных сосредоточенных объектов, наблюдаемых на фоне подстилающей поверхности, решается на различных уровнях.
В первом случае используется режим СДЦ, который позволяет селектировать движущиеся объекты по их радиальной скорости. Основное направление развития режима СДЦ - снижение минимальной радиальной скорости цели, при которой принимается решение о движении объекта. В настоящее время считается возможным обнаружение целей, движущихся со скоростью 1...2 м/с . При этом для подавления сигнала неподвижного фона используют антенну-интерферометр с двумя разнесенными вдоль линии пути фазовыми центрами.
В режиме СДЦ осуществляется не только селекция, но и измерение радиальной составляющей скорости и азимута объектов. Для этого используется пространственно-временная обработка сигналов, при которой необходима антенна с тремя и более фазовыми центрами. При одновременном формировании изображений движущихся и неподвижных объектов число необходимых фазовых центров возрастает. Возможно также одновременное измерение тангенциальной и радиальной составляющих скорости объекта при точности измерения порядка 2.. .3 м/с .
При распознавании движущегося (вращающегося) объекта возможно получение детального РЛИ методами обратного (инверсного) синтезирования. При этом даже небольшое изменение угла наблюдения объекта (угол поворота объекта относительно линии объект - РСА) или его отдельных элементов позволяет получить высокое разрешение. Например, при изменении угла на 3° возможно разрешение в плоскости поворота, равное 5... 10 длинам волн.
Вторым основным направлением использования динамического портрета является определение функционального состояния объекта. Боевая работа (стрельба, пуск ракет), а также маневрирование, движение отдельных частей объекта, работа двигателя вызывают пространственно-временную модуляцию функции отражения объекта и соответственно траекторного сигнала РСА. Обнаружение и определение параметров этой модуляции позволяет распознавать объект (класс, тип, ложная цель) и судить о его функциональном состоянии.
В случае распределенного объекта (например, водной поверхности) имеется возможность формирования динамического (частотного, фазового) портрета поверхности. Так, скоростной портрет морской поверхности (радиальная скорость движения морской поверхности в координатах дальность - азимут) позволяет определять степень регулярного волнения, турбулентности различного рода, течения. Скоростной портрет позволяет обнаруживать и распознавать морские объекты по их следам на морской поверхности, определять степень волнения в интересах судовождения и участки загрязнения (экология, следы катастроф).
Важным распознавательным признаком являются также конфигурация и взаимное перемещение группы объектов, что требует точного измерения координат и вектора скорости всех объектов в группе.
Селекция ложных целей. Проблема селекции (выделения) среди обнаруженных объектов специально созданных ложных целей (ЛЦ), схожих по ряду распознавательных признаков с заданными объектами, является одной из наиболее сложных.
Методы создания ЛЦ непрерывно совершенствуются. На первом этапе в качестве ЛЦ использовались уголковые отражатели с ЭПР, равной ЭПР объекта. С ростом разрешающей способности потребовались более сложные по конфигурации ЛЦ, которые стали повторять геометрический образ объекта (например, надувные макеты), что определяло сходство РЛИ объекта и ложной цели. Буксируемые (движущиеся) ЛЦ повторяют динамику движения объекта.
Основным направлением решения задачи селекции ЛЦ является увеличение числа распознавательных признаков объекта, формируемых РСА. Чем больше распознавательных признаков используется в РСА, тем сложнее имитировать функцию отражения, схожую с функцией отражения объекта. В этом плане эффективно использование поляризационных и частотных различий функции отражения.
Режимы формирования поляризационных, трехмерных и динамических портретов будут рассмотрены в дальнейших разделах.
|
