РадиоведениеИдентификация функции отражения
Алгоритм классификации объектов сводится к обнаружению объектов с известной функцией отражения в предположении, что в зоне анализа благодаря высокой разрешающей способности РСА находится только один объект. Кроме задачи классификации, существуют также задачи исследования функции отражения. В данном случае присутствует известный объект, но его функция отражения неизвестна, и задача сводится к идентификации объекта и его функции отражения. Оптимизация алгоритма решения этой задачи может быть выполнена на основе критерия минимума среднеквадратической ошибки воспроизведения на выходе РСА функции отражения объекта.
 представляет собой представляет собой
 с минимальной с минимальной
среднеквадратической ошибкой.
Наблюдаемый сигнал представляет собой сумму траекторного сигнала и шума:

где х - координата траекторного сигнала в памяти системы обработки (координата радиоголограммы).
Полагаем, что антенна РСА имеет одну точку приема (один фазовый центр), т.е. обработка траекторного сигнала по пространству апертуры антенны сводится к формированию суммарной ДН.
Траекторный сигнал есть результат линейного преобразования функции отражения
 - импульсная переходная характеристика системы формирования траекторного сигнала. - импульсная переходная характеристика системы формирования траекторного сигнала.
 - координата функции отражения в разрешаемом элементе дальности. - координата функции отражения в разрешаемом элементе дальности.

 системы обработки должна удовлетворять интегральному уравнению Винера-Хопфа: системы обработки должна удовлетворять интегральному уравнению Винера-Хопфа:

 - взаимная корреляционная функция входного сигнала и функции - взаимная корреляционная функция входного сигнала и функции
 - корреляционная функция входного сигнала. - корреляционная функция входного сигнала.
 не коррелированы, то не коррелированы, то
 - корреляционная функция траекторного сигнала; Кп - корреляционная функция шума. - корреляционная функция траекторного сигнала; Кп - корреляционная функция шума.
 функции отражения цели: функции отражения цели:

 интегральное уравнение (4.30) можно записать в операторной форме в виде: интегральное уравнение (4.30) можно записать в операторной форме в виде:

где знак ® означает операцию свертки.
При решении полученного уравнения методом преобразования Фурье операции свертки превращаются в произведения спектров:

 - частотная характеристика оптимального фильтра; - частотная характеристика оптимального фильтра;
 — спектральная плотность шума в траекторном сигнале. — спектральная плотность шума в траекторном сигнале.
 в траекторном сигнале. в траекторном сигнале.
Из полученного уравнения находим частотную характеристику системы фильтрации траекторного сигнала для формирования изображения функции отражения цели с минимальной среднеквадратической ошибкой:

 , т.е. , т.е.
Если шум неравномерный в полосе частот системы формирования траекторного сигнала, то фильтр также является согласованным со спектром траекторного сигнала точечной цели, но с учетом выбеливания шума:

С уменьшением спектральной плотности шума оптимальная характеристика фильтра приближается к обратной характеристике:

 становится равномерной, т.е. можно получить сколь угодно становится равномерной, т.е. можно получить сколь угодно
высокую точность воспроизведения функции отражения. Это справедливо,
 во всем рабочем диапазоне частот, что на во всем рабочем диапазоне частот, что на
 обеспечивается большое отношение сигнал/шум, а за пределами полосы отношение сигнал/шум быстро спадает. обеспечивается большое отношение сигнал/шум, а за пределами полосы отношение сигнал/шум быстро спадает.
Рассмотрим зависимость ошибки воспроизведения функции отражения цели от частотных характеристик оптимального фильтра и траек-горного сигнала. Дисперсия ошибки определяется разностью спектральных плотностей функции отражения и ее изображения:

 и подставляя в (4.32) значение и подставляя в (4.32) значение
 из (4.31), получим, что ошибка воспроизведения из (4.31), получим, что ошибка воспроизведения

 ошибка воспроизведения будет тем больше, чем шире спектр функции отражения: ошибка воспроизведения будет тем больше, чем шире спектр функции отражения:
 превращается в согласованный с траекторным сигналом фильтр, и чем больше полоса спектра функции отражения по сравнению с полосой согласованного фильтра, тем больше ошибка воспроизведения. превращается в согласованный с траекторным сигналом фильтр, и чем больше полоса спектра функции отражения по сравнению с полосой согласованного фильтра, тем больше ошибка воспроизведения.
При уменьшении спектральной плотности шума ошибка воспроизведения уменьшается.
 эквивалентно повышению разрешающей способности РСА по сравнению с использованием согласованного фильтра. При этом, естественно, уменьшается отношение сигнал/шум на выходе фильтра. эквивалентно повышению разрешающей способности РСА по сравнению с использованием согласованного фильтра. При этом, естественно, уменьшается отношение сигнал/шум на выходе фильтра.
В качестве иллюстрации данного положения рассмотрим пример, когда при согласованной фильтрации РСА имеют частотную характеристику
 При использовании оптимального фильтра частотная характеристика РСА равна При использовании оптимального фильтра частотная характеристика РСА равна

 при при
 . При увеличении отношения сигнал/шум частотная . При увеличении отношения сигнал/шум частотная
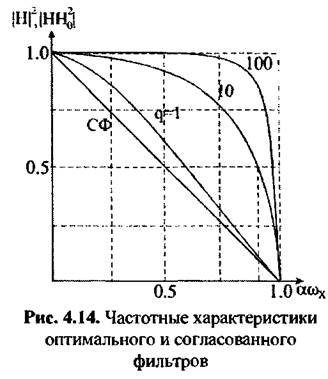
характеристика оптимального фильтра спрямляет характеристику РСА, увеличивая полосу пропускания и следовательно, разрешающую способность. При согласованной фильтрации полоса частотной характеристики РСА
 , т.е. разрешение , т.е. разрешение

 уменьшается с увеличением частоты, а спектральная уменьшается с увеличением частоты, а спектральная
 постоянна. Поэтому расширение полосы пропускания оптимальной системы обработки приводит к уменьшению отношения сигнал/шум в изображении функции отражения на выходе РСА по сравнению с согласованным фильтром . постоянна. Поэтому расширение полосы пропускания оптимальной системы обработки приводит к уменьшению отношения сигнал/шум в изображении функции отражения на выходе РСА по сравнению с согласованным фильтром .
 можно получить, измеряя сигнал можно получить, измеряя сигнал
 измеряется непосредственно по траекторному сигналу цели. Напомним, что амплитуда спектральной плотности отражения пересчитывается в область траекторного сигнала в соответствии с уравнением радиолокации. измеряется непосредственно по траекторному сигналу цели. Напомним, что амплитуда спектральной плотности отражения пересчитывается в область траекторного сигнала в соответствии с уравнением радиолокации.
 . .
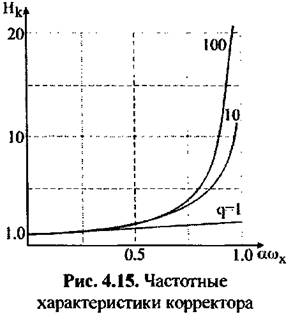
Полученное комплексное изображение функции отражения корректируется фильтром с амплитудной (взвешивающей) частотной характеристикой (второй сомножитель в числителе (4.31)). Частотная характеристика корректора определяется в основном отношением сигнал/шум. Существо коррекции состоит в уменьшении сглаживающего воздействия согласованного фильтра путем подчеркивания высоких частот сигнала изображения. Чем больше отношение сигнал/шум, тем больший подъем высоких частот может дать корректирующий фильтр, тем выше разрешающая способность РСА и выше точность воспроизведения функции отражения.
На рис. 4.15 изображен пример частотных характеристик корректора
 и и
 - значение отношения сигнал/шум. При увеличении отношения сигнал/шум в траекторном сигнале требуется резкий подъем частотной характеристики на высоких частотах, что вызывает увеличение мощности шума на выходе корректора и соответственно в изображении. - значение отношения сигнал/шум. При увеличении отношения сигнал/шум в траекторном сигнале требуется резкий подъем частотной характеристики на высоких частотах, что вызывает увеличение мощности шума на выходе корректора и соответственно в изображении.
Оптимальная обработка обеспечивает минимум среднеквадратической ошибки изображения функции отражения типа стационарного случайного поля, характерной для однородных участков земной поверхности.
Можно отметить, что в большинстве решаемых при радиовидении задач возможно и целесообразно разбиение оптимальной обработки на два этапа: первичную согласованную обработку траекторного сигнала для получения комплексного радиолокационного изображения функции отражения и вторичную обработку, алгоритм которой определяется задачами и условиями наблюдения.
Таким образом, оптимальная по точности воспроизведения функции отражения система так же, как и оптимальный классификатор, на первом этапе обработки формирует с помощью согласованного фильтра комплексное изображение функции отражения.
|
